
Um time de pesquisadores da Universidade da Costa Azul (“Côte d’Azur”), na França, desenvolveu um pequeno robô capaz de imitar os movimentos de animais marinhos, oferecendo uma maior compreensão dos mecanismos biomecânicos que fazem peixes nadarem de forma mais eficaz.
Basicamente, o que Mederic Argentina, M. Gazzola e L. Mahadevan, autores do estudo, fizeram foi desenvolver um pequeno robô capaz de entender e reproduzir o conceito de “propriocepção”, ou seja, a habilidade de animais de perceber a posição, orientação e aceleração de seus próprios corpos, se ajustando de acordo.
Leia mais
- Pescador russo publica fotos de peixes bizarros
- Disney apresenta robô autônomo do personagem Groot
- Cão-robô Spot fica sem bateria durante treinamento de combate
“Junto de meus colegas, nós descobrimos uma lei geral que prevê a velocidade de nadadores macroscópicos subaquáticos como uma função equivalente à ‘marcha’, só que dentro da água, como por exemplo a amplitude e frequência dos movimentos de uma cauda ou de uma barbatana”, disse Argentina. “O nosso trabalho ofereceu uma explicação racional dessa lei escalável, desde os nadadores com poucos centímetros até os maiores dos animais, como as baleias azuis”.
Traduzindo: eles teorizaram uma lei que rege as variações de posição corporal sob várias métricas, que rege os movimentos gerais de um animal subaquático. Para testar essa lei na prática, porém, eles necessitavam de uma plataforma que captasse dados como ondulação de caudas, bem como entender como animais nadadores conseguem tamanha amplitude e frequência desse movimento. Daí veio o robô.
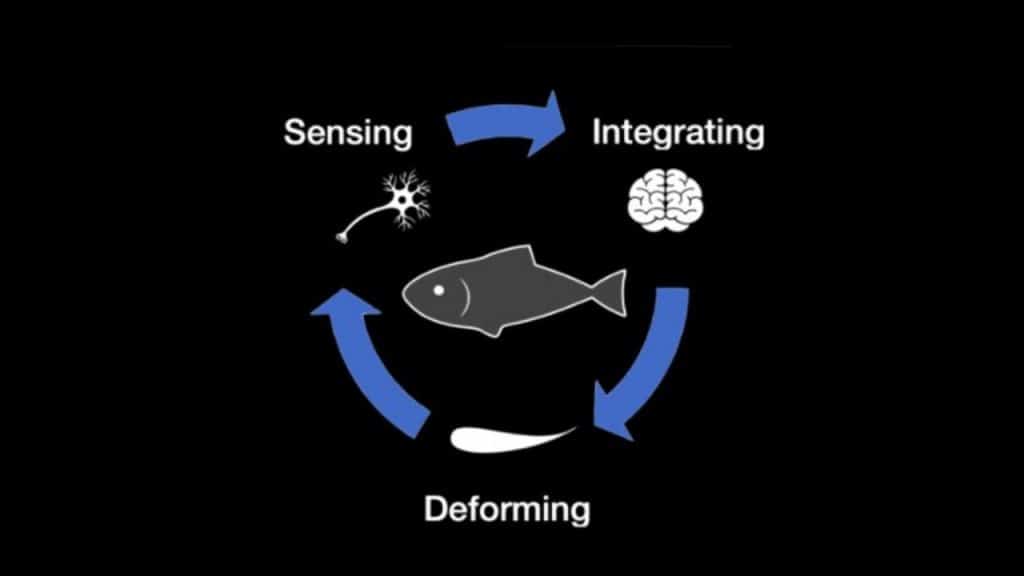
“Essa plataforma robótica nos permitiu não só validar nossa lei escalável, mas também explorar cenários de seleção da cinética de ondulação”, disse Argentina. “Pareceu natural que o conceito de propriocepção fosse o melhor candidato, já que ele é, basicamente, um ‘sexto sentido’ que avalia deformações corporais, aceleração ou sensibilidade de força. Em nosso estudo, nós nos questionamos se um feedback controlado pela propriocepção poderia desencadear movimento, e nosso trabalho demonstrou que, de fato, sensores proprioceptivos podem levar a um nado firme e coordenado”.
O estudo remete a um assunto que muitos de nós vimos lá no ensino fundamental do colégio, nas aulas de Biologia: a chamada “linha lateral” dos peixes, que permite, entre outras coisas, que eles “sintam” ondulações quando um companheiro de cardume mude de direção, e reajam de acordo. Na prática, é ela quem faz um cardume navegar pelos oceanos de forma harmônica, sem um “trombar” no outro.
O resultado do estudo foi o robô adquirir a capacidade de imitar esse movimento coordenado dos peixes, com testes comparativos a modelos reais mostrando resultados bastante promissores. No presente momento, Argentina e seus colegas estão ensinando o robô a nadar de forma autônoma por meio de machine learning. A ideia é que suas descobertas levem ao desenvolvimento de robôs que melhor naveguem sob a água.
Já assistiu aos nossos novos vídeos no YouTube? Inscreva-se no nosso canal!