Siga o Olhar Digital no Google Discover
Uma equipe de pesquisadores do Instituto Indiano de Tecnologia Indore e do Instituto Indiano de Tecnologia Jodhpur desenvolveram robô no formato de água-viva que se move e se parece como tal.
Ofertas

Por: R$ 22,59

Por: R$ 59,95

Por: R$ 3.099,00

Por: R$ 3.324,00

Por: R$ 799,00

Por: R$ 241,44
Por: R$ 349,90

Por: R$ 2.159,00

Por: R$ 188,99

Por: R$ 45,00

Por: R$ 379,00

Por: R$ 1.239,90

Por: R$ 943,20

Por: R$ 798,99

Por: R$ 205,91

Por: R$ 476,10

Por: R$ 1.139,05
Por: R$ 949,00

Por: R$ 7,60


Por: R$ 21,77

Por: R$ 16,63

Por: R$ 59,95

Por: R$ 7,20

Por: R$ 139,90

Por: R$ 119,90

Por: R$ 398,99

Por: R$ 79,90

Por: R$ 199,90
Apresentado oficialmente no International Journal of Intelligent Robots and Applications, esse robô deverá ser usado para monitorar a vida marinha e em missões subaquáticas.
Leia mais:
- 5 motivos para NÃO usar o Yahoo Search
- O que é preciso para ter um drone?
- Cão-robô joga futebol na areia, neve e até na lama
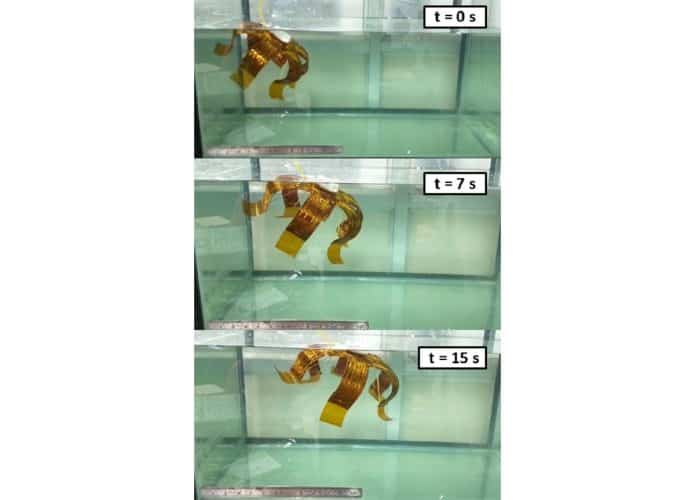
“Um novo robô flexível de água-viva baseado em poli-imida acionado por liga de memória de forma [SMA] foi fabricado e o pulso e o processo de recuperação da água-viva foram imitados”, escreveu a equipe de Muralidharan, responsável pelo projeto.
A técnica existente de fabricação de tentáculos embutidos em fio SMA é processo demorado e cansativo. A estrutura proposta é nova, econômica e fácil de fabricar com muito menos consumo de tempo em comparação com os métodos convencionais baseados em moldes.
Pesquisadores responsáveis pelo projeto
Desenvolvimento do robô subaquático
- No início do projeto, Muralidharan e seus colegas cortaram folhas de 75 μm de espessura de poliamida Kapton (fita à base de poliamida);
- Esses recortes foram feitos em estrutura simétrica que lembra o corpo de uma água-viva, com 25 cm de diâmetro;
- Após isso, eles perfuraram buracos nesta estrutura em posições específicas e inseririam fios SMA.
Os SMAs (liga com efeito memória de forma) são metais com propriedade que permite retornar à sua forma original após serem deformados por calor. Nesse robô, os pesquisadores usaram um SMA chamado nitinol, popularmente usado na criação de dispositivos, conectores de cabos e outros componentes eletrônicos.
Na fase seguinte do projeto, o nitinol foi inserido nos orifícios perfurados na estrutura semelhante à água-viva, com pedaço adicional de fita de poliamida colada no topo do corpo do robô para fixar o fio no lugar. Depois, os pesquisadores conectaram a ponta de cada tentáculo ao centro do corpo do robô com cordas de borracha.
O deslocamento e a velocidade do tentáculo da água-viva durante a imitação foram medidos. A modelagem de temperatura da estrutura incorporada da SMA e a modelagem de deflexão usando a teoria de flexão de feixe foram realizadas. Além disso, uma simulação preliminar da imitação da água-viva foi realizada no Ansys Fluent e a força de impulso foi avaliada.
Muralidharan, responsável pelo projeto
O robô em formato de água-viva pesa cerca de 45g e é baseado em materiais acessíveis, permitindo a produção em maior escala. Nos primeiros testes, ele apresentou bom desempenho, conseguindo nadar horizontalmente em velocidade de 10 mm/s e verticalmente a 0,2 mm/s.
A equipe estima que o robô possa ser utilizado futuramente para diversas questões marinhas via monitoramento de ambientes subaquáticos.
Com informações de TechXplore
Já assistiu aos novos vídeos no YouTube do Olhar Digital? Inscreva-se no canal!

