Siga o Olhar Digital no Google Discover
As mãos robóticas atuais tentam imitar fielmente a anatomia humana, numa tentativa de reproduzir nossas capacidades. Uma pesquisa publicada nesta terça-feira (20) na revista Nature Communications desafia essa lógica: a equipe criou uma mão robótica capaz de andar sozinha e agarrar objetos de forma completamente diferente da nossa.
E apesar da brincadeira com o Mãozinha, da Família Addams, o grupo de pesquisadores garante que nunca tinha ouvido falar no personagem e não se inspirou nele para a criação do objeto.
Mão robótica não tenta imitar anatomia humana
É justamente por não imitar a anatomia humana que a mão robótica consegue ampliar suas capacidades.
A ideia surgiu de uma observação cotidiana de Aude Billard, especialista em robótica do Instituto Federal Suíço de Tecnologia (EPFL) e mãe de três filhos. Ela percebeu que tarefas simples, como carregar vários objetos ao mesmo tempo, exigem movimentos complexos e que a mão humana não consegue realizar com tanta eficiência. Para ela, a destreza humana tem limites claros, especialmente quando é necessário agarrar itens fora do campo visual ou em posições pouco naturais.
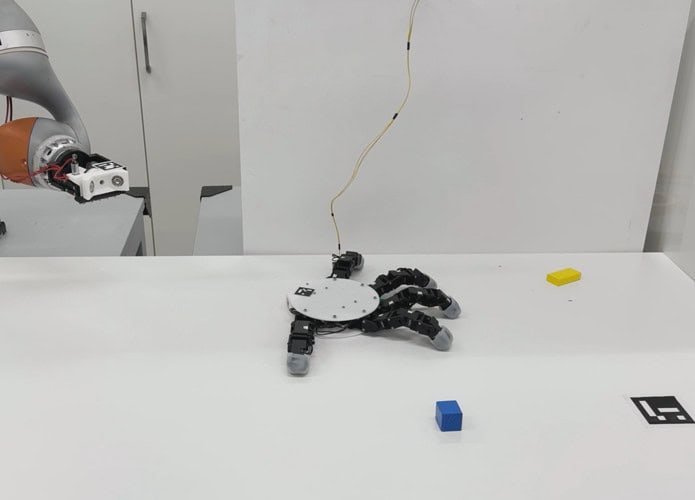
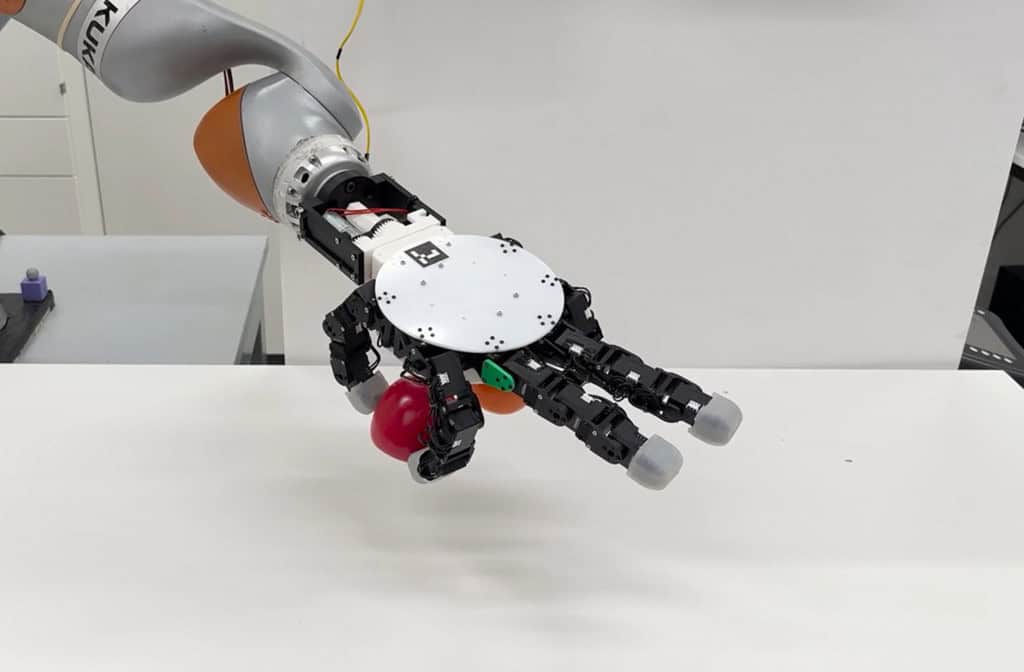
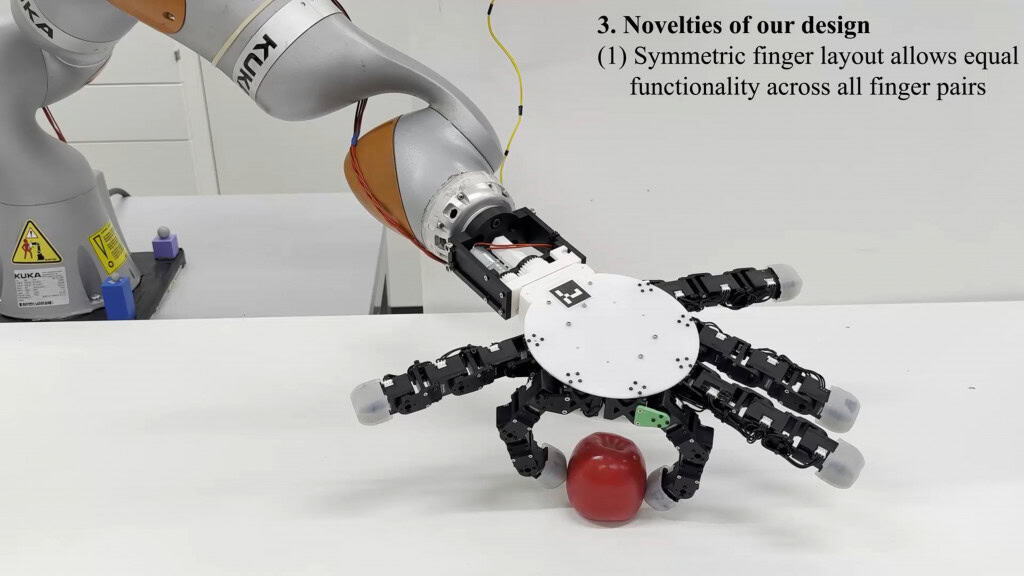
A partir dessa constatação, a equipe desenvolveu uma mão robótica modular, feita de silicone, motores e componentes impressos em 3D. A estrutura foge do modelo clássico “dedos com polegar”. A palma funciona como um disco no qual vários dedos idênticos podem ser acoplados, permitindo mais flexibilidade.
Diferentemente da mão humana, qualquer par de dedos pode atuar como pinça. Faça o teste em casa. Você provavelmente não vai conseguir segurar objetos com eficiência usando o indicador e o anelar, ou o indicador e o mindinho. A ‘Mãozinha’ robótica consegue.
Mão robótica passou por testes com objetos
Antes de ser construída fisicamente, a mão foi testada em simulações computacionais. O software avaliou diferentes arranjos e sequências de ativação dos dedos para conseguir segurar objetos variados – inclusive múltiplos itens ao mesmo tempo. Na sequência, essas estratégias foram transferidas para o robô real, que executou as tarefas no mundo físico.
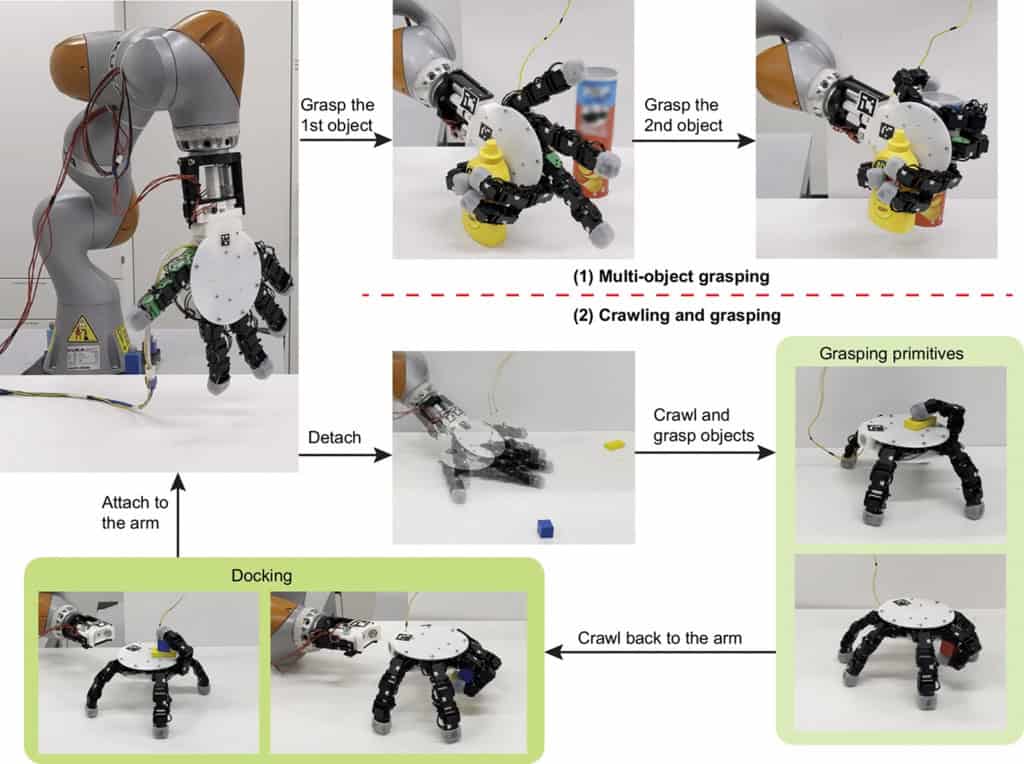
O resultado é um sistema capaz de contornar limitações da mão humana. Os dedos podem se enrolar individualmente ou em conjunto ao redor de um objeto, fixá-lo diretamente à palma ou até segurar itens em ambos os lados da mão simultaneamente, usando combinações distintas de dedos. Isso amplia as capacidades de segurar ou manipular objetos em relação ao que nós, humanos, podemos fazer.
Um dos aspectos que mais chamou atenção do projeto é a capacidade da mão se desacoplar do restante do robô e andar sozinha. Nessa configuração, ela se transforma em um pequeno robô rastejante, se movendo pela superfície usando os dedos como se fossem pernas. Em alguns casos, o sistema utiliza os nós dos dedos para se mover, ao mesmo tempo que pode usar as extremidades para manipular objetos.
Leia mais:
- Os avanços tecnológicos que marcaram 2025
- Mão de robô (quase) se move como mão de humanos; assista
- Corpos de metal e mentes com IA generativa redefinem o uso de humanoides
Onde a mão pode ser usada?
O The New York Times consultou especialistas sobre as aplicações da mão robótica:
- Para Xiao Gao, pesquisador da Universidade de Wuhan e coautor do estudo, a possibilidade da mão robótica andar sozinha abre caminho para aplicações em ambientes de difícil acesso, como o interior de tubulações, compartimentos técnicos de embarcações ou outras áreas confinadas onde robôs convencionais não conseguem operar;
- Billard também levanta a possibilidade de, no futuro, esse tipo de tecnologia ser explorado em próteses robóticas com algum grau de interação neural.
Já especialistas que não fizeram parte do estudo destacam uma abordagem inovadora, mas apontam desafios:
- Nancy Pollard, pesquisadora da Universidade Carnegie Mellon, reconhece os avanços no conceito da mão robótica, mas observa que dedos altamente flexíveis podem não exercer a mesma força que estruturas mais rígidas (como os dedos humanos), sem contar as limitações na manipulação depois que objeto já está segurado;
- Para Perla Maiolino, vice-diretora do Instituto de Robótica de Oxford, o projeto amplia as possibilidades tradicionais de preensão robótica. Ela destaca que nunca havia visto uma mão capaz de se mover para além do corpo do robô ou de fechar simultaneamente os dois lados da palma, e avalia que a combinação dessas ideias cria novas possibilidades para o campo.
Veja uma demonstração da mão na prática:
