
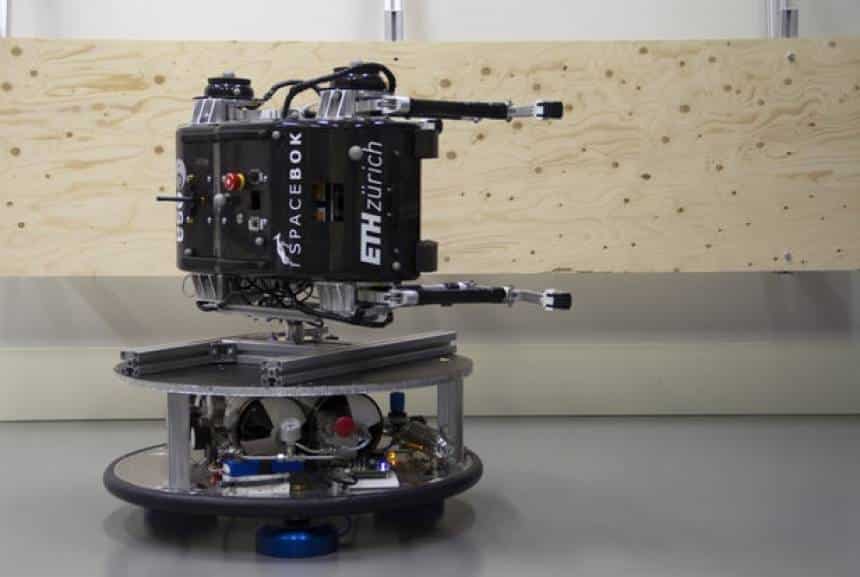
Vimos robôs que podem andar, correr e até dar saltos mortais, mas agora uma equipe de estudantes está trabalhando em um protótipo que é capaz de pular alto e rápido em gravidade lunar. Projetado e construído por estudantes da ETH Zurich e ZHAW Zurich, o chamado SpaceBok está sendo testado em um centro técnico da Holanda.
Quando a missão Apollo 11 aterrissou na Lua, uma das tarefas atribuídas a Neil Armstrong e Buzz Aldrin foi praticar a movimentação sobre a superfície, que possuí um sexto da gravidade da Terra. Embora ambos os astronautas já tivessem treinado e simulado as condições do local, não havia alguém que realmente conseguisse se adaptar perfeitamente.
De acordo com a equipe suíça, o SpaceBok poderia pular até 2 m verticalmente na Lua, o que significa que poderia se mover com uma velocidade surpreendente. No entanto, quando um corredor quadrúpede assume uma marcha onde todas as quatro pernas rompem o contato com o solo, a estabilidade torna-se um problema real.

Alguns ajustes foram feitos e agora o robô realiza uma caminhada dinâmica. “Ao invés da caminhada estática, onde pelo menos três pernas permanecem no solo o tempo todo, a caminhada dinâmica permite andar em todas as fases, mesmo durante o pulo. Nele todas as pernas ficam fora do chão”, diz o líder do projeto Hendrik Kolvenbach. “Os animais fazem uso de caminhada dinâmica devido à sua eficiência, mas até recentemente, o poder computacional e os algoritmos necessários para o controle tornavam difícil realizá-la em robôs”.
A SpaceBok usa pernas com molas incorporadas que atuam como unidades de armazenamento de energia para absorver o impacto de cada “pouso”, e então reutiliza a força para o próximo salto. Além disso, é equipado com algo que os outros não possuem, uma roda de reação que se permite se orientar da mesma maneira que um satélite.
“O teste foi suficientemente bom, e até usamos o SpaceBok para jogar uma partida ao vivo de Pong, o clássico dos videogames”, diz Kolvenbach. Testes posteriores colocarão o robô em ambientes que incluirão obstáculos, terreno montanhoso e solo realista, que serão seguidos por testes externos.
Via: NewAtlas