Uma equipe de engenheiros mecânicos e aeronáuticos da Universidade de Stanford criou um robô inspirado em aranha para uso na exploração de cavernas em Marte. Em artigo publicado na Science Robotics, o grupo afirma que o “robozinho” chamado ReachBot foi bem nos primeiros testes realizados.
Leia mais:
- Primeiro robô com rodas sem aros pode caminhar e subir degraus; conheça
- Empresa lança robô humanoide de IA controlado com linguagem natural
- Os robôs estão cada vez mais próximos de integrar nossas vidas, avalia MIT
Como é o robô explorador
- No desenvolvimento de robôs exploratórios para uso em outros planetas, os cientistas costumam apostar em pequenos rovers capazes de passar em espaços apertados.
- A equipe de Stanford fez diferente. Eles criaram um robô maior de médio porte para explorar áreas de difícil acesso para outros tipos de robôs, como cavernas ou tubos de lava, por exemplo.
- Para construir o robô, a equipe se inspirou na aranha opilião. Os pesquisadores notaram sua capacidade de se mover por uma ampla variedade de terrenos com facilidade, incluindo paredes de cavernas.
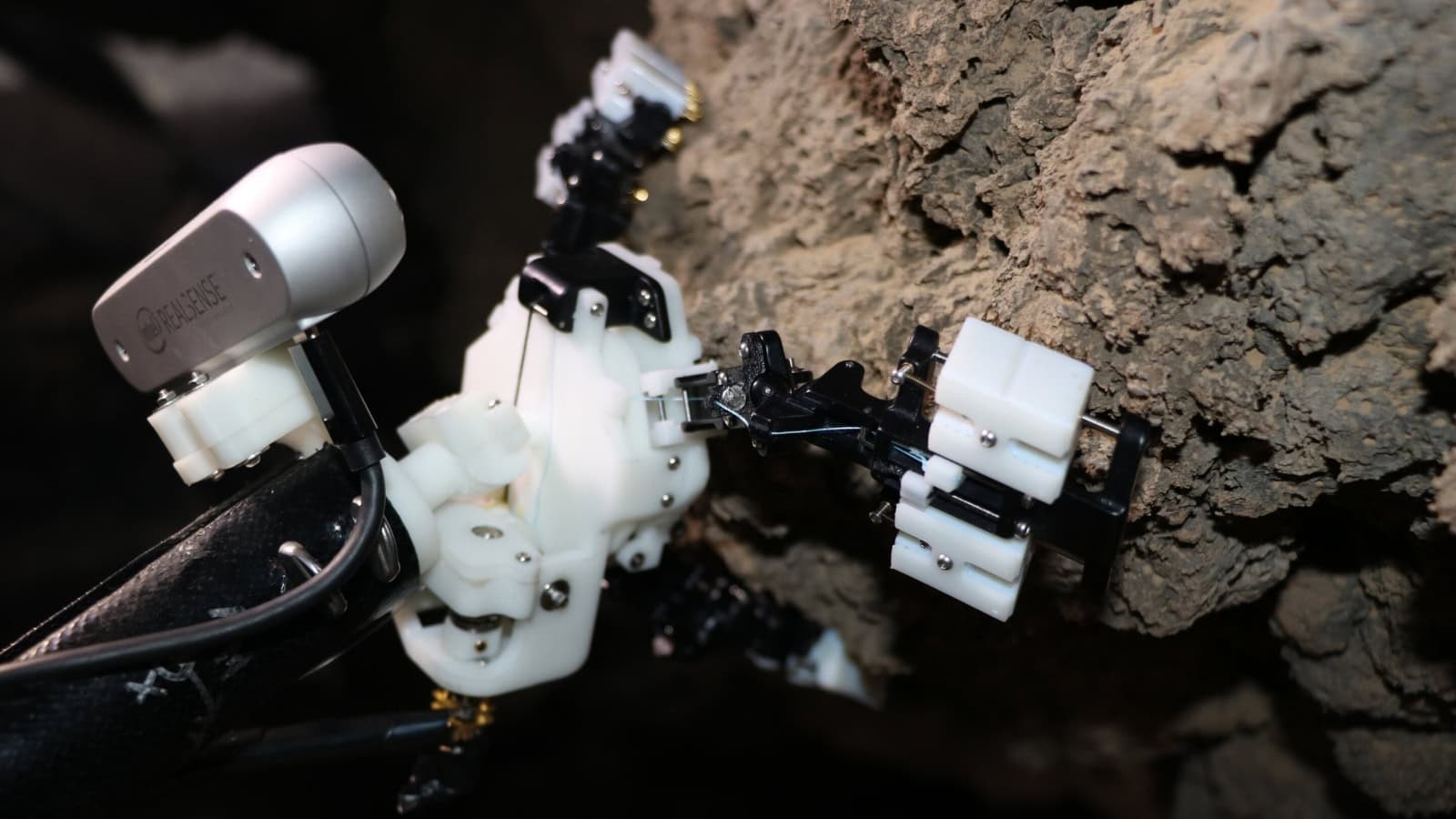
- Tal como o aracnídeo, o robô possui várias pernas extensíveis em forma de lança que servem para caminhar e se segurar em paredes rochosas.

O ReachBot também consegue explorar locais por conta própria. Seu processador analisa o terreno e mapeia as melhores áreas para caminhar em segurança. Nos testes, o robô conseguiu subir paredes e até escalar o teto. Outros testes mostraram que ele também podia explorar tubos de lava nas proximidades da cratera Pisgah, no deserto de Mojave.
No fim, a equipe de investigação conclui que a ideia conceitual é sólida e que pode ser útil no desenvolvimento de novos tipos de sondas para explorar planetas como Marte. O robô poderia permitir o estudo de lugares que nenhum outro poderia alcançar, por exemplo, quem sabe até encontrando evidências de habitações anteriores.
