
Siga o Olhar Digital no Google Discover
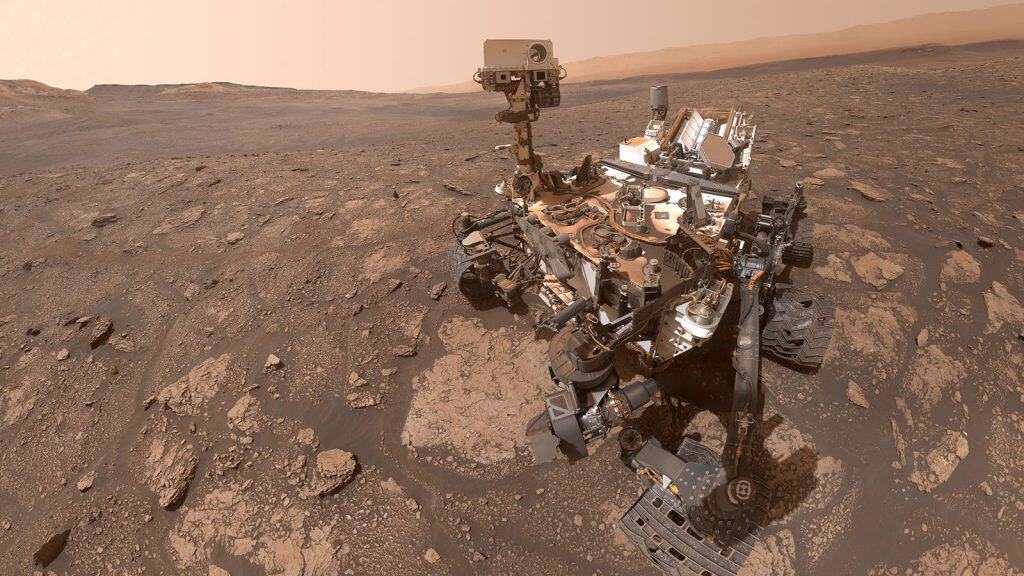
O rover Curiosity, da NASA, agora conta com um algoritmo específico para proteger as suas rodas conforme ele navega pelos terrenos áridos e irregulares de Marte. Em uma postagem no blog do Laboratório de Propulsão a Jato (JPL), a agência espacial americana contou detalhes de como o software trabalha.
Ofertas

Por: R$ 36,21

Por: R$ 24,96

Por: R$ 9,90
Por: R$ 5,86

Por: R$ 113,70
Por: R$ 6,90

Por: R$ 37,92

Por: R$ 22,59

Por: R$ 59,95

Por: R$ 3.099,00

Por: R$ 3.324,00

Por: R$ 799,00

Por: R$ 241,44
Por: R$ 388,78

Por: R$ 2.159,00

Por: R$ 188,99

Por: R$ 45,00

Por: R$ 379,00

Por: R$ 1.239,90

Por: R$ 943,20

Por: R$ 798,99

Por: R$ 199,00

Por: R$ 476,10

Por: R$ 1.139,05
Por: R$ 949,00


Por: R$ 119,90

Por: R$ 398,99

Por: R$ 79,90

Por: R$ 199,90
Ao contrário de seu irmão caçula Perseverance, o Curiosity está em Marte há quase 10 anos, e desde 2013 suas rodas começaram a mostrar sinais de desgaste. Desde então, engenheiros mecânicos e de software do JPL vinham desenvolvendo sistemas que pudessem minimizar esse impacto de forma remota.
Leia também
- Vida em Marte: compostos orgânicos encontrados pelo rover Curiosity podem ser um sinal
- Confira a nova selfie em 360º feita pelo rover Curiosity em Marte
- Acidente feliz: rover Curiosity identifica matéria orgânica “sem querer” em Marte
“Não existem mecânicos em Marte”, diz trecho da postagem. “Então a melhor forma de cuidar do Curiosity é dirigir com cuidado. Um novo algoritmo faz justamente isso. O software, chamado apenas de ‘controle de tração’, ajusta a velocidade de giro das rodas do Curiosity de acordo com as rochas que ele estiver escalando”.
Segundo a NASA, o algoritmo passou por 18 meses de testes antes do upload dele ser feito no sistema do Curiosity, em março de 2020. A agência conta que o algoritmo analisa mudanças de ângulo nas suspensões independentes do rover, a fim de “saber” quando o veículo passa por alguma irregularidade, alterando a velocidade da roda “desalinhada” e evitando tropeços e paradas forçadas.
“Em terrenos planos, todas as rodas do rover se movem na mesma velocidade. Mas quando uma roda passa por um terreno irregular, a inclinação faz com que a roda de trás ou da frente escorregue”, diz outro trecho. “Essa mudança de tração é especialmente problemática se considerarmos as pedras mais pontiagudas. Quando isso acontece, as rodas da frente forçam as de trás na rocha, e vice-versa”.
A grosso modo, as rodas mais elevadas podem acabar se trincando ou sendo perfuradas. Isso porque, apesar do rover conter esteiras que cobrem as rodas, elas são relativamente macias, e pedras pontudas podem perfurá-las sem muita dificuldade.
O algoritmo do Curiosity também atua para impedir — ou pelo menos minimizar — o chamado “falso giro”. Dependendo da pedra, a roda mais alta continua subindo, até o ponto onde ela deixa de tocar o solo e começa a girar no ar, sem contato e, consequentemente, sem movimento. Em uma situação do tipo, o sistema vai reduzir e ajustar a velocidade das outras rodas para fazer com que a mais alta desça, mas sem perder o trajeto ambicionado.
De acordo com o JPL, o algoritmo das rodas do Curiosity é acionado por padrão, mas pode ser desligado conforme a necessidade da NASA.
Já assistiu aos nossos novos vídeos no YouTube? Inscreva-se no nosso canal!