Siga o Olhar Digital no Google Discover
O avanço da robótica envolve grandes projetos e muito investimento. Mas um grupo de pesquisadores quis provar que é possível criar robôs funcionais de uma forma muito mais simples. E foi assim que surgiu o robô ambulante Mugatu, que pode andar sobre duas pernas de uma forma semelhante aos humanos.
Ofertas

Por: R$ 37,92

Por: R$ 22,59

Por: R$ 59,95

Por: R$ 3.099,00

Por: R$ 3.324,00

Por: R$ 799,00

Por: R$ 241,44
Por: R$ 388,78

Por: R$ 2.159,00

Por: R$ 188,99

Por: R$ 45,00

Por: R$ 379,00

Por: R$ 1.239,90

Por: R$ 943,20

Por: R$ 798,99

Por: R$ 200,29

Por: R$ 476,10

Por: R$ 1.139,05
Por: R$ 949,00

Por: R$ 155,44

Por: R$ 119,90

Por: R$ 398,99

Por: R$ 79,90

Por: R$ 199,90
Leia mais
- Robô “mais avançado do mundo” diz como será a vida em 100 anos
- Novo robô minúsculo muda de forma e cabe em espaços apertados
- Robôs da Amazon ajudarão funcionários em novo armazém
Andando sobre duas pernas
- Ao longo das últimas décadas, engenheiros de robótica têm trabalhado para criar robôs que possam andar sobre duas pernas tão suavemente quanto animais ou humanos.
- Para isso, são necessários motores, hidráulica avançada, chips de processamento e várias outras peças, tornando as invenções sofisticas e caras.
- Mas as tecnologias desenvolvidas ainda andavam como robôs.
- Um novo projeto, no entanto, adotou uma abordagem totalmente diferente.
Mugatu: o robô mais simples do mundo
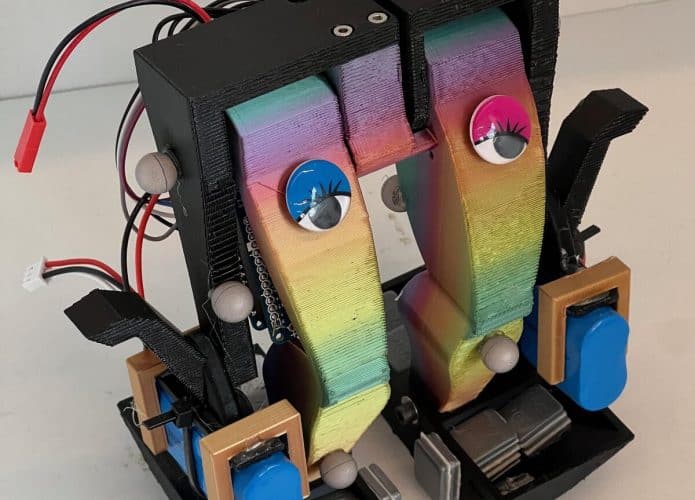
Em publicação no arXiv, os pesquisadores apresentaram o Mugatu, o robô ambulante mais simples de todos.
O trabalho foi inspirado no engenheiro canadense Tad McGeer, que no final dos anos 1980 construiu um robô simples que não tinha motores, atuadores ou computadores para controlar os movimentos. Em vez disso, ele utilizava o equilíbrio e a gravidade para poder andar.
Com base nessas informações, os pesquisadores desenvolveram um robô semelhante que pode se movimentar em uma superfície plana utilizando apenas um atuador.

Pernas conectadas para potencializar a gravidade
O robô conta com duas pernas, conectadas na parte superior, segundo informação da Tech Xplore. Cada uma delas tem um pé na extremidade inferior, mas nenhum joelho.
A tecnologia utilizada potencializa a gravidade para possibilitar que o Mugatu ande. Os pés, por exemplo, foram moldados de uma forma que permite que o robô role para frente e para trás, mas também vire ligeiramente para um lado ou para o outro.
As pernas também foram montadas para garantir que o centro de gravidade do robô estivesse sempre abaixo do centro de curvatura de cada pé. Isso significa que, se ele se desequilibrasse, sempre voltaria para uma posição vertical.
Eles também adicionaram outra característica: quando em pé com os pés juntos, o robô sempre se inclinava ligeiramente para trás, permitindo que uma perna levantasse sem nunca correr para o chão. O design se mostrou altamente eficiente em termos de energia.
Mugatu é apenas o primeiro passo para a criação de um novo tipo de robô bípede, que dependa mais do design das pernas do que de tecnologias para movê-las.
Já assistiu aos novos vídeos no YouTube do Olhar Digital? Inscreva-se no canal!

