
Uma técnica chamada “percepção certificável” criada por um estudante do MIT (Massachusetts Institute of Technology) pretende fazer com que os carros autônomos evitem acidentes ao perceber quando estão falhando. E evitar assim acidentes relacionados à tecnologia autônoma.
O objetivo dos desenvolvedores é fazer com que o motorista receba um alerta do veículo para assumir o volante se o sistema de percepção falhar. Dito de outra forma: a inteligência artificial dos veículos pode salvar vidas ao criar, vamos dizer, um senso de humildade. Que percebam que estão errando e peçam ajuda ao humano.
Pressa, inimiga da perfeição
A premissa é que os sistemas robóticos projetados para interpretar seus arredores (como os sistemas implementados em carros sem motorista) usam algoritmos para fazer estimativas. Porém, não há como estabelecer se essas estimativas foram corretas ou não.
“Esses algoritmos de percepção são projetados para serem rápidos, com pouca garantia de que o robô tenha conseguido obter uma compreensão correta do que está ao seu redor”, diz Hang “Hank” Yang, estudante de graduação do Massachusetts Institute of Technology (MIT) e líder do projeto.
Nesses casos, uma certificação seria útil. Com ela, seria possível ajudar a proteger a próxima geração de veículos autônomos, além dos veículos com os quais eles compartilham a estrada.
Um carro que dirige sozinho tira fotos (2D) de um carro que se aproxima, por exemplo. As imagens passam por um sistema de aprendizado de máquina chamado rede neural, que gera pontos-chave dentro da imagem sobre os espelhos, rodas, portas dos carros que se aproximam, etc.
Um novo algoritmo para autônomos
A partir daí, linhas são desenhadas que procuram rastrear os pontos-chave detectados na imagem 2D do carro a pontos-chave rotulados em modelos 3D de carros existentes em um banco de dados.
Mas isso pode falhar: no exemplo abaixo, um carro identifica de forma incorreta os contornos de outro o ultrapassando pela esquerda.
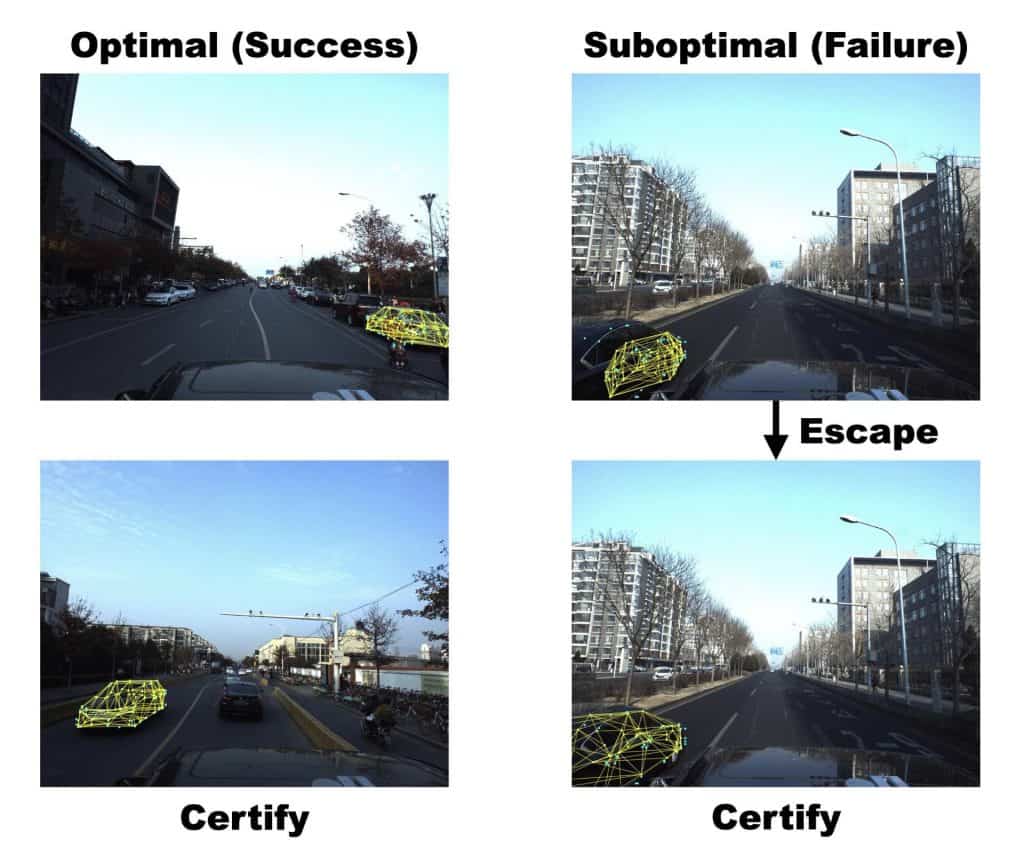
“Devemos então resolver um problema de otimização para girar e traduzir o modelo 3D para alinhá-lo com os pontos-chave da imagem”, diz Yang. “Este modelo 3D ajudará o robô a entender o ambiente do mundo real”.
Cada linha traçada deve ser analisada para ver se criou uma correspondência correta. Como há muitos pontos-chave que podem ser correspondidos incorretamente (por exemplo, a rede neural pode reconhecer erroneamente um espelho como uma maçaneta), o algoritmo de percepção certificável da equipe de Yang vai buscando encontrar correspondências mal sucedidas.
Leia mais:
- Algoritmo promissor quer acabar com acidentes de veículos autônomos
- Startup demonstra inteligência artificial de direção autônoma em tráfego intenso
- Tecnologia pode reduzir risco de acidentes em carros autônomos
“Se a correspondência não estiver correta, nosso algoritmo saberá como continuar tentando até encontrar a melhor solução, conhecida como mínimo global. O certificado é dado quando não há soluções melhores”, explica. Ou seja, o objetivo é que o sistema de percepção seja capaz de “saber” quando falhou, e assim enviar um alerta para o motorista poder assumir o volante quando isso acontecer.
“Esses algoritmos certificáveis têm um grande impacto potencial, porque ferramentas como carros autônomos devem ser robustas e confiáveis. Nosso objetivo é fazer com que o motorista receba um alerta para assumir o volante se o sistema de percepção falhar”.
Adaptando o modelo a diferentes carros
Ao combinar a imagem 2D com um modelo 3D, uma suposição é de que o modelo 3D se alinhará com o tipo de carro identificado. Mas o que acontece se a imagem do carro tiver uma forma que o robô não possui em sua biblioteca? “Agora precisamos estimar a posição do carro e reconstruir a forma do modelo”, diz Yang.
A equipe descobriu uma maneira de contornar esse desafio. O modelo 3D é transformado para coincidir com a imagem 2D, passando por uma combinação linear de veículos previamente identificados.
Por exemplo, o modelo pode mudar de Audi para Hyundai ao registrar a construção correta do carro real. Identificar as dimensões do carro que se aproxima é a chave para evitar colisões.
O jovem pesquisador afirma que algoritmos de próxima geração podem ser a chave para que seja alcançada a “autonomia confiável” necessária para os veículos sem motorista.
Já assistiu aos nossos novos vídeos no YouTube? Inscreva-se no nosso canal.
Imagem: metamorworks/iStock
