
Você sabia que o Instituto de Tecnologia de Massachusetts (MIT) tem um “robô-guepardo”? Nós também não, mas não só descobrimos que o projeto é real, como esse mesmo robô-guepardo aprendeu a pular. E você achou que a humanidade parou nos cães robóticos franco-atiradores, certo?
Leia também
- Uso de “robôs-garçons” aumenta valor de gorjetas em restaurante da Flórida
- As meninas afegãs que conquistaram o mundo pelo talento em robótica
- Robô sem fio corta grama usando GPS
A novidade vem do próprio MIT, porque evidentemente é válido a humanidade se gabar das criações que um dia poderão matá-la. No comunicado oficial da instituição, os pesquisadores dizem que “robôs de quatro pernas foram inspirados pelos movimentos de guepardos e outros animais, tendo enorme progresso, mas eles ainda estão bem atrás de seus ‘primos mamíferos’ quando o assunto é atravessar ambientes com rápidas alterações de elevação”.
E sim, eles produziram um vídeo:
“Nessas condições, você precisa usar [um sistema de] visão noturna para evitar uma falha. Por exemplo, transpor um buraco pode ser difícil se o robô não puder vê-lo. Apesar de existirem alguns métodos para incorporar a visão noturna na locomoção por pernas, a maioria não é muito recomendável para sistemas robóticos ágeis”, disse Gabriel Margolis, estudante de Ph.D no Laboratório de Ciências da Computação e Inteligência Artificial (IA) do MIT.
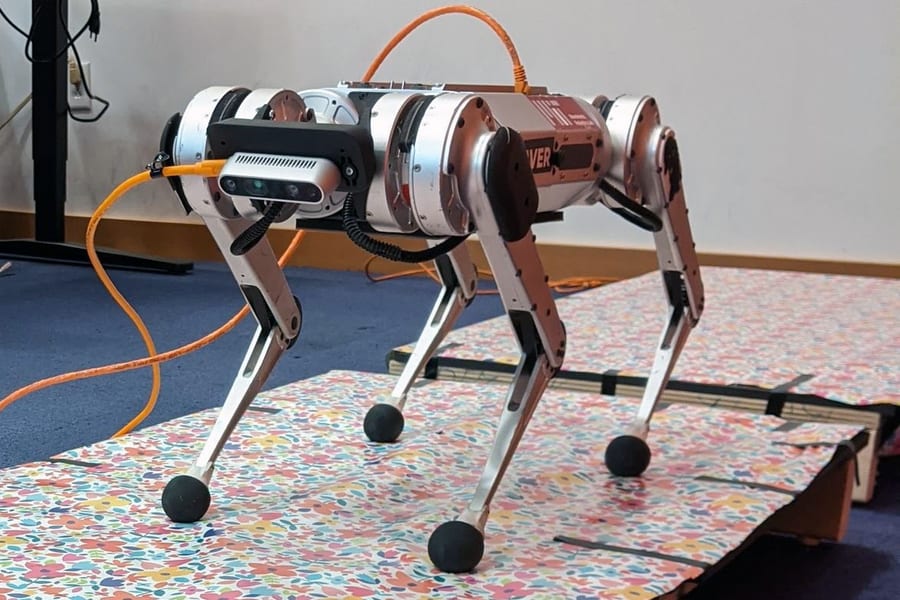
A fim de contornar essa dificuldade, Margolis e sua equipe desenvolveram um sistema que “aprimora a velocidade e agilidade de robôs com pernas conforme eles saltam sobre falhas no terreno”. Tal sistema se divide em duas partes: o processamento em tempo real da filmagem obtida por uma câmera montada na parte frontal do robô e outra que traduz essa informação em diretrizes que dizem como o robô deve se mover.
Em termos resumidos: o sistema enxerga o buraco à frente e ensina a plataforma onde ele está instalado a pular, de forma inteligente. E o MIT achou interessante embarcar tudo isso em um robô nomeado a partir de um animal que corre a velocidades de até 130 km/h e estrangula presas na base de mordidas no pescoço.
Sabe quem não corre a 130 km/h? Isso mesmo: nós.
O novo método se provou vantajoso pois, ao contrário de outras plataformas, ele não exige o mapeamento prévio do terreno a ser percorrido, permitindo em teoria que o “robô-guepardo que sabe pular” vá para qualquer lugar. A ideia é a de que, no futuro, essa plataforma possa ser usada na resposta a emergências em áreas isoladas ou na entrega de suprimentos em locais de difícil acesso.
O controle desse sistema aplica inteligência artificial (IA) para que o processamento do vídeo capturado pela câmera seja feito em tempo real. Segundo o MIT, diversas formas “cegas” (que não fazem uso de vídeo) dessa aplicação trazem recursos bastante robustos, mas uma dificuldade é a necessidade de que o terreno seja contínuo, sem alterações de relevo. Outros dependem de um mapeamento prévio que “ensina” o algoritmo antes da execução prática do percurso.
A fim de contornar isso, Margolis desenvolveu um formato híbrido: enquanto um sistema paralelo cuida da captura de vídeo e controle das articulações do robô, a IA se concentra em processar as imagens recebidas e “aprender” a evitar os obstáculos ao utilizar todas as direções – não apenas lateral e diagonalmente (implicando o desvio apenas por caminhada), mas também verticalmente (onde entra a capacidade de salto).

Para testar a eficácia do projeto, os pesquisadores rodaram simulações baseadas em vários tipos de terreno, por um processo de tentativa e erro, estabelecendo uma métrica de pontuação como “recompensa”. Rapidamente, o sistema percebeu quais ações lhe renderiam mais pontos e passou a adotá-las como padrão.
Pense assim: quando você ensina seu pet a sentar, ele ganha um petisco. Se ele sentar e rolar, dois petiscos. E assim por diante. Mas ao invés do seu vira-latas, é um robô com uma rede neural na cabeça.
E essa rede neural fez com que o “robô guepardo que aprendeu a pular” fosse bem sucedido em 90% dos testes executados, superando o desempenho de sistemas de controle unitários.
“Uma novidade do nosso sistema é o fato de ele corrigir a forma de andar do robô”, disse Margolis. “Se um humano tentar saltar sobre uma fenda muito aberta, ele pode começar com uma corrida para desenvolver velocidade e, só então, juntar os dois pés para dar força a um salto bem poderoso. Da mesma forma, nosso robô pode ajustar seu próprio timing e a duração do contato dos seus pés com o solo para melhor cruzar o terreno”.
De acordo com Margolis, o projeto atual serviu apenas para mostrar que o sistema funciona, e ele ainda está bem longe de uma aplicação prática (supostamente). No futuro, o time do MIT pretende usar um computador interno com maior poder de processamento para conduzir essas leituras diretamente pela plataforma. Além disso, eles querem refinar o controle minoritário para que ele não perca eficiência diante de diferentes intensidades de luz.
Já assistiu aos nossos novos vídeos no YouTube? Inscreva-se no nosso canal!
