Siga o Olhar Digital no Google Discover
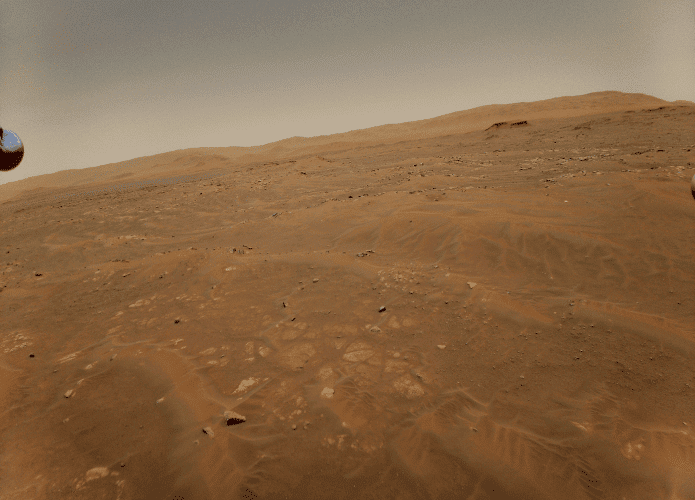
O helicóptero Ingenuity realizou seu sexto voo na superfície de Marte, informou a Nasa nesta quinta-feira (27). A pequena aeronave subiu a uma altitude de 10 metros e sobrevoou 150 metros para sudoeste, a uma velocidade de 4 metros por segundo. Mas, em determinado momento, o helicóptero passou por um problema na atividade do dia 22 de maio.
Ofertas

Por: R$ 37,92

Por: R$ 22,59

Por: R$ 59,95

Por: R$ 3.099,00

Por: R$ 3.324,00

Por: R$ 799,00

Por: R$ 241,44
Por: R$ 388,78

Por: R$ 2.159,00

Por: R$ 188,99

Por: R$ 45,00

Por: R$ 379,00

Por: R$ 1.239,90

Por: R$ 943,20

Por: R$ 798,99

Por: R$ 200,29

Por: R$ 476,10

Por: R$ 1.139,05
Por: R$ 949,00

Por: R$ 155,44

Por: R$ 119,90

Por: R$ 398,99

Por: R$ 79,90

Por: R$ 199,90
Quando estava a 15 metros do caminho a sudoeste, o Ingenuity deveria ter ido para sul, enquanto fazia imagens do oeste, e, em seguida, voar mais 50 metros para nordeste e pousar. Nesse percurso, a telemetria do voo mostrou que os primeiros 150 metros foram feitos tranquilamente. Mas, a parte final apresentou falha.
Leia mais:
- Cientista da Nasa pede seriedade no trato de OVNIs
- Nasa vai usar supernovas para obter mais informações da matéria escura
- Nasa vai projetar novo observatório para enfrentar mudança climática

O Ingenuity começou a ajustar a velocidade e se inclinar, para frente e para trás, em um padrão oscilante, comportamento este que seguiu até o final do voo. Antes de pousar em segurança, sensores a bordo do helicóptero indicaram que a aeronave encontrou “excursões de rotação e inclinação de mais de 20 graus, grandes entradas de controle e picos no consumo de energia”, explicou a Nasa.
A anomalia do sexto voo do Ingenuiy aconteceu 54 segundos após a decolagem. O que houve foi uma falha no pipeline de imagens entregues pela câmera de navegação, que causou uma perda de apenas uma imagem. Além disso, todas as imagens de navegação posteriores foram entregues com marcação de data e hora imprecisos.
Assim, sempre que o algoritmo de navegação do helicóptero fazia uma correção com base na imagem de navegação, ele operava com informações incorretas. Isso fez com que os dados usados para pilotar a aeronave resultassem em uma degradação significativa e correções constantes. Por isso, ele passou a oscilar.
Apesar do problema, o Ingenuity conseguiu manter o voo e pousar com segurança na superfície, a cerca de 5 metros de distância do local de pouso pretendido. De acordo com a Nasa, o helicóptero conseguiu fazer isso porque houve um grande esforço para garantir que o sistema de controle de voo tivesse uma boa margem de estabilidade.
“Projetamos o Ingenuity para tolerar erros significativos sem se tornar instável, incluindo erros de cronometragem. Essa margem não era necessária nos voos anteriores, porque o comportamento do veículo era familiar com nossas expectativas, mas a margem veio em nosso socorro no voo seis”, escreveu Håvard Grip, piloto-chefe do helicóptero, no Jet Propulsion Laboratory (JPL).
Via: Nasa
Já assistiu aos nossos novos vídeos no YouTube? Inscreva-se no nosso canal!

